Podvozek na pocketBota.
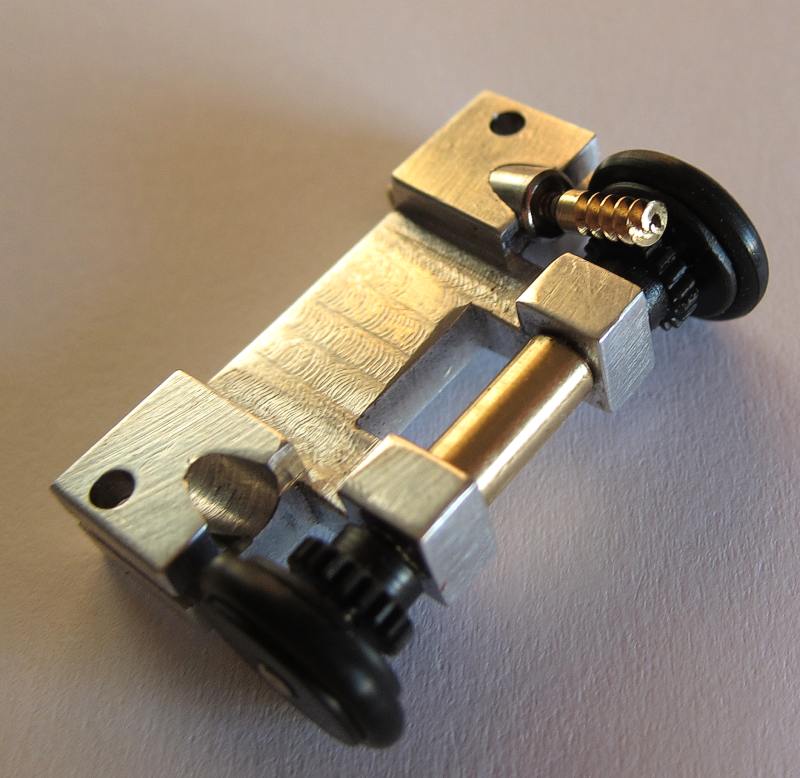
Pro miniaturního robota Ondřeje Staňka jsem vyrobil tento podvozek:
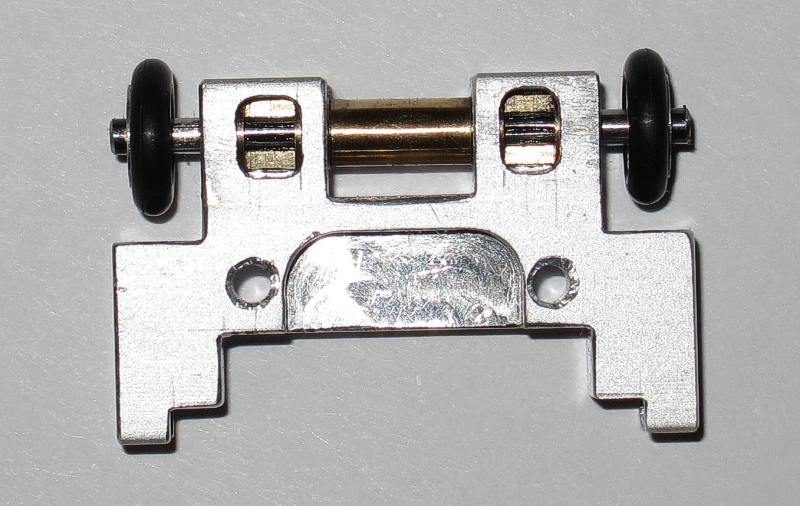
Kostra z duralu, kolečka z O kroužků, vnější průměr 8 mm, disky duralové, osičky 2mm.
Celkové rozměry samotného podvozku se odvíjely od požadovaného rozměru - krabičky zápalek.
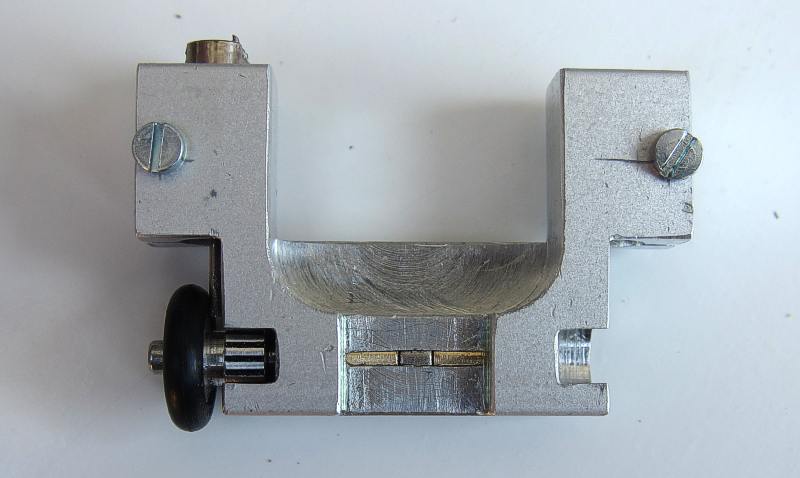
Pro pohon jsem použil klasické vibrační motorky průměr 4mm.
Abych docílil co nejmenší výšky, použil jsem třecí převod s magnetickým přítlakem.
Ve střední části mosazného válečku je zalepený neodymový magnet o průměru 3mm.
K němu jsou z každé strany přitahovány hřídelky 2mm. Změnou vzdálenosti hřídelky od magnetu
se dá nastavit požadovaná velikost síly přítlaku kola k ose motorku.
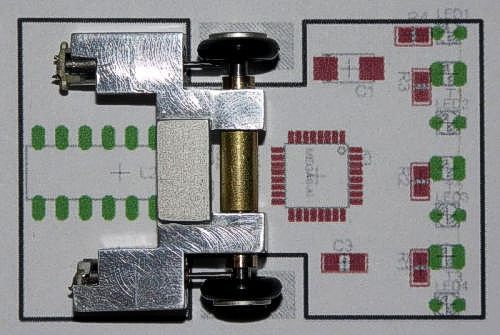
Pro PocketBot2 vznikla další varianta podvozku tentokrát s enkodérem.

Princip pohonu zůstal zachován. Zde je dobře vidět neodymiový magnet uprostřed.
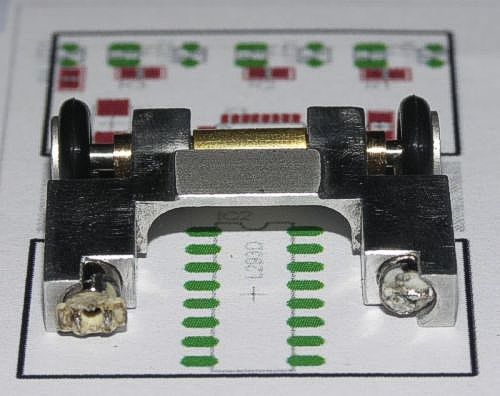
Další varianta s drážkovanou hřídelí pro odečet otáčení.
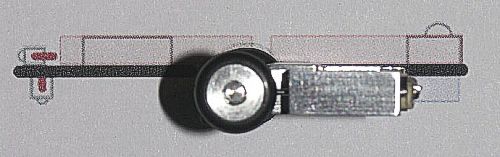
A varianta bez snímání otáček se šnekovým převodem.